En la Lernejo de Arkitektura Asocio in London arbeiten sie am Graduate Design Programm an Designstudien zu «Behavioral Complexity», vor allem 3D-gedruckte und pneumatische Roboter, die einen einzigen, ganz bestimmten Zweck erfüllen oder nach einem einzigen «simplen» Algorithmus funktionieren. Synergia ist zum Beispiel ein Konzept für programmierbare Materie mit pneumatischen Roboter-Würfel-Schwärmen, OwO sind sowas wie Robot-Maden für den öffentlichen Raum.

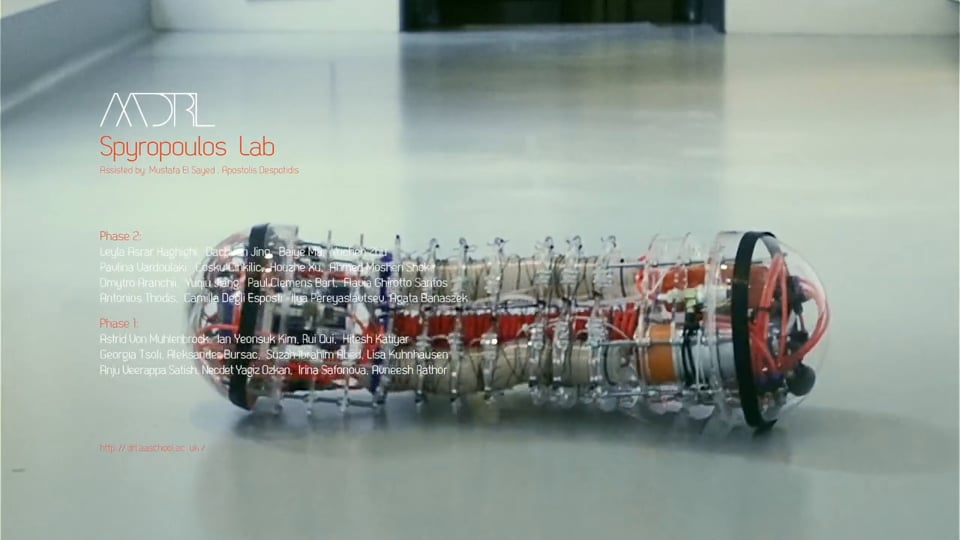
AADRL Spyropoulos Design Lab 2016 (Fazo 2)
Kreaj Aplikoj havas superrigardon de la Finaj tezoj 2016. Vi povas duone ignori la informajn tekstojn, ĉar ĉiam estas multaj malmodestemaj desegnaj sonoriloj kaj fajfiloj de rulkolokaj sveteroj portantoj, sed la laboro mem efektive povus esti por NASA kaj iliaj pneŭmatikaj moduloj tiaj. Bigelow Spaca Vivejo esti interesa.
La sekvanta estas la laboro de AADRL Spyropoulos Design Lab, kiu esploris konduto-bazitajn dezajnsistemojn kiuj estas memkonsciaj, moveblaj kaj mem-strukturaj kaj kunvenantaj. La esplorado esploras altajn loĝantarmoviĝentojn kiuj evoluigas dezajnon kiu moviĝas preter finhavaj konceptoj de spaco al unu kiu kunevoluas kaj adaptiĝas. La esplorado rigardas evoluajn strategiojn de inteligentaj dezajnunuoj kiuj per organizo evoluigas korpajn planojn kiuj ebligas novajn kondutojn aperi. Ekzemplo de tio estas OWO-projekto sub kiu kiel unuopa unuo estas konceptigita kiel unuo kiu per enigita pneŭmatiko permesas al la unuo disetendiĝi/kontrakti, krispiĝi kaj ruliĝi. Kun respekto al moviĝeblo kiel individua unuo ĝi povas ruliĝi en sia moviĝeblo-reĝimo, sed ekzemple unuo ligas al du aliaj unuoj tiam la korpoplano permesas tripiedkonfiguracion, kiu permesas al la estaĵo piediri.
AADRL Spyropoulos Design Lab
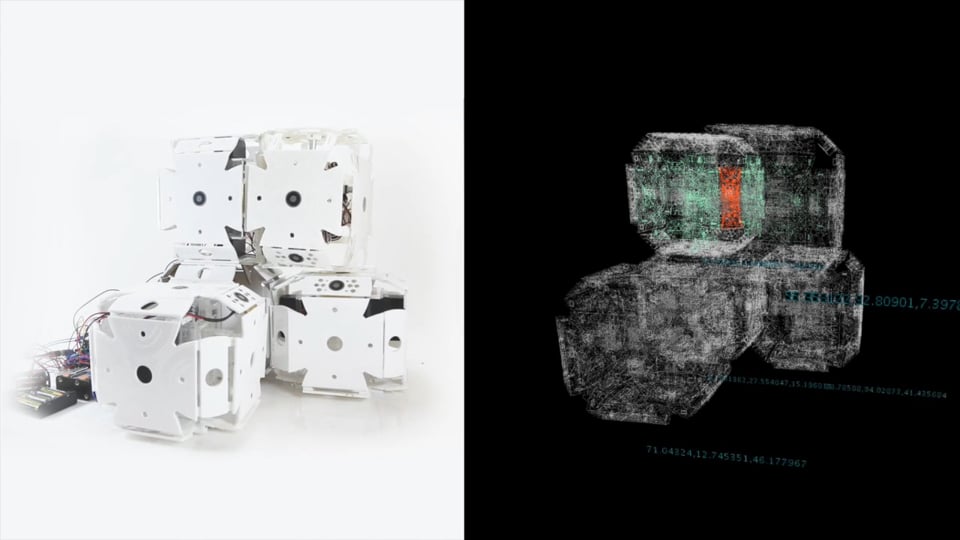
AADRL Spyropoulos_HyperCell
Pli por vi:






 "Dravens Tales from the Crypt" sorĉas dum pli ol 15 jaroj kun sengusta miksaĵo de humuro, serioza ĵurnalismo - por aktualaĵoj kaj malekvilibra raportado en la gazetara politiko - kaj zombioj, ornamitaj per multe da arto, distro kaj punkroko. Draven transformis sian ŝatokupon en popularan markon, kiu ne povas esti klasifikita.
"Dravens Tales from the Crypt" sorĉas dum pli ol 15 jaroj kun sengusta miksaĵo de humuro, serioza ĵurnalismo - por aktualaĵoj kaj malekvilibra raportado en la gazetara politiko - kaj zombioj, ornamitaj per multe da arto, distro kaj punkroko. Draven transformis sian ŝatokupon en popularan markon, kiu ne povas esti klasifikita.
Mia blogo neniam estis desegnita por disvastigi novaĵojn, des malpli iĝi politikaj, sed kun aktualaĵoj mi simple ne povas ne kapti informojn ĉi tie, kiuj estas alie cenzuritaj en ĉiuj aliaj kanaloj. Mi konscias, ke la dezajnpaĝo eble ne ŝajnas al multaj "serioza" tiurilate, sed mi ne ŝanĝos tion por plaĉi al la "ĉefa". Ĉiu, kiu estas malfermita al neŝtataj informoj, vidas la enhavon kaj ne la pakaĵon. Mi sufiĉe provis provizi homojn per informoj dum la lastaj 2 jaroj, sed rapide rimarkis, ke neniam gravas kiel ĝi estas "pakita", sed kia estas la sinteno de la alia persono al ĝi. Mi ne volas meti mielon sur la buŝon de iu ajn por renkonti atendojn iel ajn, do mi konservos ĉi tiun dezajnon ĉar espereble iam mi povos ĉesi fari ĉi tiujn politikajn deklarojn, ĉar ne estas mia celo daŭrigi. tiel por ĉiam ![]() Mi lasas al ĉiuj kiel ili traktas ĝin. Vi bonvenas kopii kaj distribui la enhavon, mia blogo ĉiam estis sub la Permesilo WTFPL.
Mi lasas al ĉiuj kiel ili traktas ĝin. Vi bonvenas kopii kaj distribui la enhavon, mia blogo ĉiam estis sub la Permesilo WTFPL.
Estas malfacile por mi priskribi kion mi efektive faras ĉi tie, DravensTales fariĝis kultura blogo, muzika blogo, ŝoka blogo, te blognika blogo, terura blogo, amuza blogo, blogo pri trovitaj eroj en interreto, interreta bizara, ruba blogo, arta blogo, akvovarmigilo, zeitgeist-blogo tra la jaroj. , Forĵeta blogo kaj prena sako-blogo nomata. Ĉio prava ... - kaj tamen ne. La ĉefa fokuso de la blogo estas nuntempa arto, laŭ la plej vasta senco de la vorto.
Por certigi la funkciadon de la retejo, vi bonvenas Faru donacon per kreditkarto, Paypal, Google Pay, Apple Pay aŭ rekta debeto/bankkonto. Koran dankon al ĉiuj legantoj kaj subtenantoj de ĉi tiu blogo!